Proportionale Regelstrecken
Alle Regelstrecken mit proportionalen Eigenschaften sind Strecken mit Ausgleich. Eine reine P-Strecke gibt es praktisch nicht. Ihr Verhalten ist idealisiert und gilt immer dann, wenn der Zeitverzug sehr klein und praktisch nicht messbar ist. Die meisten P-Strecken streben den Ausgleich mit unterschiedlichen Verzögerungen an.
P-T0-Strecken
Eine verzögerungsarme Strecke liegt vor, wenn die Regelgröße ohne messbaren Zeitverzug der Stellgröße folgt und quasi sprunghaft ihren Beharrungszustand erreicht. Sie wird als Strecke nullter Ordnung bezeichnet und mit den Symbolen P0, P-T0 oder P-T0 gekennzeichnet.
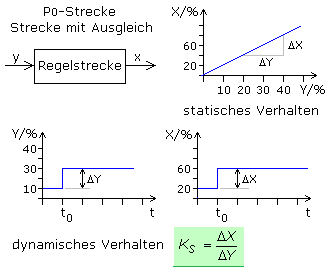
Untersucht man das statische Verhalten und stellt die Messergebnisse als X = f(Y) dar, entsteht eine Gerade, aus deren Steigung der Übertragungsbeiwert KS der Strecke abgelesen werden kann. Die grafische Darstellung des dynamischen Verhaltens der Regelgröße als Funktion der Zeit X = f(t) zeigt eine zur Eingangssprungfunktion proportionale Sprungfunktion.
Der Übertragungsbeiwert, bei P-Strecken auch als Proportionalbeiwert bezeichnet, wird stets für den stationären oder eingeschwungenen Zustand bestimmt. Er gibt an, wie sich Regelgröße und Stellgröße zusammen ändern. Der KS-Wert wird zum Teil auch dann als Streckenverstärkung bezeichnet, wenn er kleiner als 1 ist.
P-Strecken mit Verzögerung
Die meisten P-Strecken besitzen ein oder mehrere Speicherglieder, die zu unterschiedlichen Zeiten ihren Endzustand annehmen, wodurch der endgültige Beharrungszustand verzögert erreicht wird. Man notiert zu jeder neuen Stellgröße die sich einstellende Regelgröße im Beharrungszustand für t → ∞ und stellt die Funktion X = f(Y) der Strecke dar. Das Ergebnis sind Kurven mit kontinuierlich abnehmender Steigung oder mit einem Wendepunkt mit zunehmender Steigung zu Beginn und abnehmender Steigung zum Kurvenende.
Ein geschlossener Druckluftspeicherkessel erreicht nach sprunghafter Änderung des Eingangsdrucks (y) seinen Enddruck (x) im Inneren nicht sogleich. Die Drehzahl eines Elektromotors ändert sich bei sprunghaftem Lastwechsel oder einer Spannungsänderung (y) nur verzögert dem neuen Endwert (x), da zuvor die Trägheit der Ankermasse und die Induktionseffekte der Ankerwicklung und/oder der Feldwicklung zu kompensieren sind. Bei einer Elektroheizung müssen sich erst das Heizelement, dann das Übertragungsmedium und der Heizkörper erwärmen, bevor Energie an den Raum abgegeben werden kann. Bis die konstante Endtemperatur erreicht wird, sind noch die unterschiedlichen Wärmegradienten der Raumgrenzen und der Einrichtungen auszugleichen.
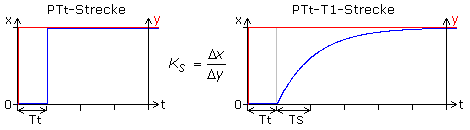
Das dynamische Verhalten dieser Strecken bestimmt man am einfachsten durch die Aufnahme der Sprungantwort. Erreicht die Regelgröße ihren Endwert nach einer e-Funktion verzögert, dann hat die Strecke nur einen wirksamen Speicher. Es handelt sich um eine P-Strecke 1. Ordnung, geschrieben als P-T1- oder P-T1-Strecke. Die Sprungantwort einer Proportionalstrecke mit zwei oder mehreren unterschiedlichen Speichergliedern hat einen Wendepunkt und wird als P-T2- oder P-Tn-Strecke bezeichnet.
P-T1-Strecke
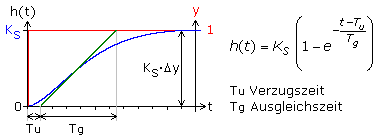
Ein RC-Tiefpass hat mit dem Kondensator ein Speicherglied und diente für die folgende Grafik als Streckensimulation. Dargestellt ist der Verlauf der Einheitssprungfunktion dieser P-T1-Strecke. Sie hat mit y = 0 für t < 0 einen Ruhezustand. Die Eingangsgröße springt für t ≥ 0 auf den Wert 1. Die Regelgröße x erreicht mit der Übertragungsfunktion h(t) ihren Ausgleichswert KS.
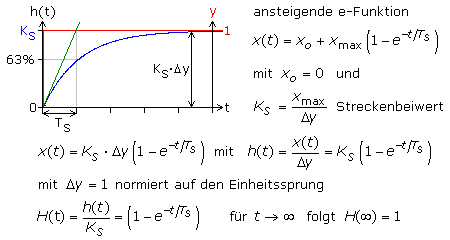
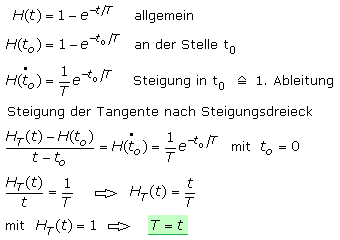
Die Zeitkonstante TS zeigt an, wie schnell der Endwert einer exponentiell verlaufenden Regelgröße erreicht werden könnte, wenn die Anfangsteigung im Punkt bei t = 0 bestehen bliebe. Zur grafischen Ermittlung von TS legt man die Tangente an den Sprungbeginn und ermittelt die Zeit bis zum Schnittpunkt mit dem zurück verlängerten Endwert KS. Die Steigung der Tangente zum Zeitpunkt t0 ist gleich der ersten Ableitung der normierten Funktion H(t). Aus dem Steigungsdreieck kann TS mathematisch hergeleitet werden. H(t) erreicht zum Zeitpunkt T den Wert 1.
Bei einer P-T1-Strecke muss zum Zeitpunkt t = 3·TS die Regelgröße 95 % ihres Endwertes erreicht haben.
Ist dieses Kriterium nicht erfüllt, dann handelt es sich um eine P-Strecke höherer Ordnung.
P-T2-Strecke und P-Tn-Strecken
Zur Simulation einer P-Strecke 2. Ordnung wurden ein RL- und RC-Tiefpass in Reihe geschaltet und so dimensioniert, dass die Strecke im Untersuchungsbereich nicht schwingt. Ebenso denkbar ist die nicht schwingfähige Reihenschaltung von zwei RC-Tiefpässen mit unterschiedlichen Zeitkonstanten. Die Grafik zeigt für den Einheitssprung die Sprungantwort einer Strecke mit zwei Speichergliedern. Sie wird durch drei Kenngrößen beschrieben, dem Übertragungsbeiwert KS, einer Verzugszeit Tu und einer Ausgleichszeit Tg
Legt man die Tangente an den Wendepunkt, lassen sich beide Zeiten wie in der Skizze dargestellt grafisch ermitteln. Die Wendetangente schneidet unten die zur Zeitachse parallel laufende Verlängerung der Regelgröße vor dem Sprung und oben die des Endwerts. Der erste Zeitabschnitt ist die Verzugszeit Tu, die zum Teil auch als Ersatztotzeit bezeichnet wird. Der darauf folgende Abschnitt ist die Ausgleichszeit Tg, teilweise auch Ersatzzeitkonstante genannt.
Regelbarkeit
Bei P-Tn-Strecken, den Strecken höherer Ordnung wird Tu zunehmend größer und die Strecke schwerer regelbar. Aus der Sprungantwort ist erkennbar, dass während der Verzugszeit die Strecke nur sehr schwach auf eine Stellwertänderung y reagiert. Das Zeitverhältnis Tg / Tu gibt Hinweise auf die Regelbarkeit einer Strecke oder im Kehrwert, auf den Schwierigkeitsgrad S sie zu regeln. Die Tabelle zeigt dazu einige Anhaltswerte.
| Tg / Tu | Regelbarkeit | S = Tu / Tg | Schwierigkeitsgrad |
|---|---|---|---|
| <1,5 | sehr schlecht | >0,65 | sehr hoch |
| 1,5 ... 2,5 | schlecht | 0,65 ... 0,4 | hoch |
| 2,5 ... 5 | befriedigend | 0,4 ... 0,2 | mäßig |
| 5 ... 10 | gut | 0,2 ... 0,1 | einfach |
| >10 | sehr gut | <0,1 | sehr leicht |
Eine P-Tn-Strecke ist umso besser regelbar je größer Tg im Vergleich zu Tu ist.
Anlaufzeit und Anlaufwert
Es handelt sich um zwei dynamische Kennwerte von Regelstrecken, bei deren Bestimmung man davon ausgeht, dass die Änderungsgeschwindigkeit der Regelgröße x bis zum Erreichen des Sollwerts w konstant bleibt. Der Anlaufwert A ist der Kehrwert der maximalen Änderungsgeschwindigkeit der Regelgröße bei voller Ausnutzung des Stellbereichs. Im Bereich der Anlaufzeit TA verläuft die Sprungfunktion linear mit maximaler Steigung. Die Anlaufzeit ist somit die Zeit, die bei voller Ausnutzung des Stellbereichs Yh vergeht, bis die Regelgröße x den gewünschten Sollwert w erreicht hat. Wenn das Stellglied nicht immer dem maximalen Stellbereich folgen kann und Δy < Yh ist, muss mit dem Korrekturfaktor Δy / Yh erweitert werden.
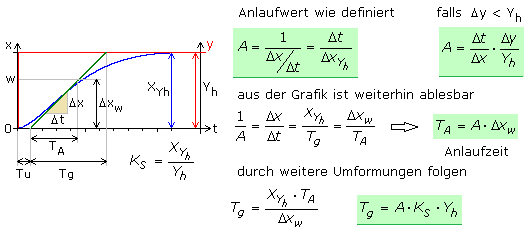
Der Schwierigkeitsgrad S einer Strecke kann ebenso mit der Verzugszeit und der Anlaufzeit oder dem Anlaufwert definiert werden: S = Tu / TA oder S = Tu / (A · Δxw). Für S gelten die Abschätzungen, wie sie in der Tabelle oben zu finden sind.
P-Tt-Strecke mit Totzeit
Förderbandstrecken oder Rohrleitungen, wo die Messstelle relativ weit vom Stellort entfernt ist, haben eine Totzeit. Auf eine Änderung der Stell- und/oder Störgröße kann der Regelkreis erst dann reagieren, wenn die Information am Messort angekommen ist. Die Totzeit ergibt sich aus der Streckenlänge und der Transportgeschwindigkeit entlang der Strecke. Strecken mit Totzeit sind sehr schwer regelbar. Eine sehr lange Verzugszeit Tu einer P-Tn-Strecke entspricht in ihren ersten zwei Dritteln mehr oder weniger einer Totzeit. Einfache Totzeitstrecken haben mit KS und Tt zwei Kennwerte.