Bistabile Kippstufe mit Transistoren
Können sich in einer symmetrisch aufgebauten Schaltung zwei Transistoren, die als elektronische Schalter arbeiten gegenseitig beeinflussen, entsteht eine Kippstufe. Sind die Zweige gleich dimensioniert, versuchen beide Transistoren beim Einschalten der Betriebsspannung in den leitenden Zustand zu kommen. Reale Transistoren haben Bauteiltoleranzen, sodass einer der Transistoren besser leitet, schneller schaltet und dadurch den anderen in den Sperrzustand zwingt. Die Schaltung ist ab diesem Zeitpunkt in einem der zwei möglichen stabilen Zustände. Ohne einen angeschlossenen Lastwiderstand ist die Kollektor-Ausgangsspannung des gesperrten gleich der Betriebsspannung. Die Ausgangsspannung des leitenden Transistors entspricht dem niedrigen Wert der Sättigungsspannung seiner Kollektor-Emitter Strecke. Mit realen Bauteilen wird bei jeder Inbetriebnahme ein Zweig leitend und einer gesperrt sein. Es ist aber nicht gewährleistet, dass immer der gleiche Schaltzustand auftritt.
Zur Dimensionierung der Schaltung müssen die Betriebsspannung und die maximalen Kenndaten der Transistoren bekannt sein. Die Kollektor-Arbeitswiderstände sollten klein genug sein, um mit einem hohen Kollektorstrom kurze Schaltzeiten zu erreichen. Die angeschlossenen Lastwiderstände sollten so groß sein, dass die Belastung der Ausgangsspannung zu vernachlässigen ist. Der Basisstrom sollte hoch genug sein, um den Sättigungszustand des leitenden Transistors zu erreichen. Die Basis-Emitter-Spannung wird dann bei 750 mV liegen. Zur Simulation mit Multisim 10.1 von National Instruments wurde der Transistor BC 547 gewählt. Für ihn sind ein maximaler Kollektorstrom von 100 mA und der Stromverstärkungsfaktor zwischen 200 bis 450 angegeben.
Ohne Lastwiderstand kann in der folgenden Schaltung der maximale Kollektorstrom 10 mA betragen. Für den minimalen Stromverstärkungsfaktor B = 200 des BC 547 errechnet sich der Basisstrom zu 50 μA. Für das sichere Durchsteuern des Transistors wird der doppelte Wert angenommen. Mit diesen Parametern können die Kollektorspannung des gesperrten Transistors und der Basisvorwiderstand berechnet werden.
Für die folgende Schaltung wird angenommen, dass der rechte Transistor niederohmig nach Masse durchgeschaltet ist und der linke Transistor gesperrt ist. Um diesen Zustand zu erreichen, muss im rechten Zweig beim Einschalten ein größerer Kollektorstrom fließen oder der Stromanstieg schneller erfolgen als im linken Zweig. Am Kollektorwiderstand rechts ist dadurch der Spannungsfall höher und die Kollektorspannung niedriger als im linken Zweig. Die höhere Kollektorspannung links verursacht einen größeren Strom durch den Basisvorwiderstand, mit dem der rechte Transistor leitend gesteuert wird. Der linke Transistor erhält einen geringeren Basisstrom und wird weniger gut oder nicht so schnell leitend gesteuert. Je besser der rechte Transistor leitet, desto geringer wird seine Kollektorspannung und damit auch der Basisstrom zum linken Transistor. Er gerät gegenüber dem rechten Zweig in den endgültigen Sperrzustand. Ist der Transistor rechts maximal leitend, also durchgeschaltet, dann ist seine Kollektor- oder Ausgangsspannung kleiner 1 V. Mit diesem Wert bleibt der Basisstrom zum linken Transistor so niedrig, dass seine Basis-Emitter Diode sicher gesperrt ist und kein Kollektorstrom fließen kann. Seine Ausgangsspannung entspricht ungefähr der Betriebsspannung. Ein stabiler Schaltzustand mit A1 = High und A2 = Low ist erreicht.
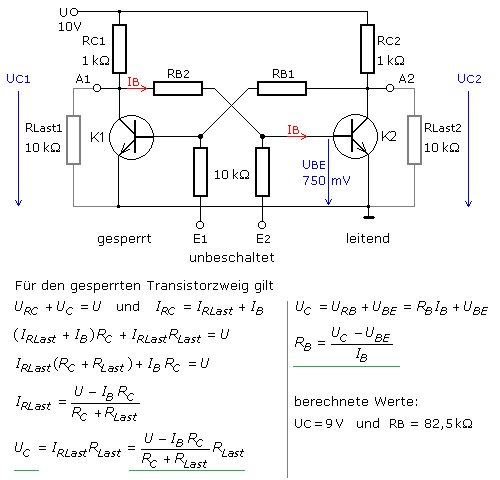
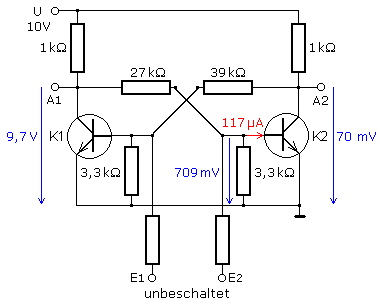
Die Simulation funktionierte (erstaunlich) reproduzierbar einwandfrei. Die Kollektorspannung des gesperrten Zweigs mit angeschlossenem Lastwiderstand betrug gemessen 9 V, der Basisstrom für den leitenden Transistor wurde mit (98 ... 101) μA und die Basis-Emitter-Spannung mit (707 ... 709) mV gemessen. Im Einschaltmoment waren beide Transistoren für 500 μs mit einer Kollektorspannung von 2,6 V leitend. Nach einem Einschwingvorgang (50 kHz) war nach weiteren 250 μs stets der gleiche Transistor vollständig leitend und der andere total gesperrt. Die Kollektor-Emitter-Spannung (Sättigungsspannung) des leitenden Transistors betrug 76 mV.
Oft ist es sinnvoll, dass die Schaltung nach dem Einschalten in einen vorgegebenen Betriebszustand geht. Auch nach dem Ersatz eines defekten Transistors gleichen Typs soll das Einschaltverhalten unverändert sein. Der Transistor, der den größeren Basisstrom erhält, schaltet schneller durch und zwingt den parallel liegenden Transistorzweig in den Sperrzustand. Vor zu hohen Umschaltpegeln können die Basis-Emitter Strecken auch durch passend dimensionierte Basisspannungsteiler geschützt werden. Der Basisspannungsteiler ist für einen doppelten Querstromfaktor dimensioniert. Die bistabile Kippstufe wird als Flipflop bezeichnet und stellt ein 1-Bit Speicherelement dar. Sie hat an den Ausgängen mit High und Low unterschiedliche, entgegengesetzte Potenziale.
Mit unterschiedlichen Basisvorwiderständen von 68 kΩ für einen anfangs schneller leitenden Transistor und 82 kΩ für den dadurch gesperrten Zweig wurde der gewünschte Einschaltzustand erst nach 5 μs dauernder reproduzierbarer Einschwingzeit erreicht. In der Simulation war das definierte Schaltverhalten mit Basisspannungsteilern optimal. Eine in Reihe zum Basisvorwiderstand leitend geschaltete Diode kann das Sperren dieses Zweigs unterstützen. Da erst die Sperrzone der Diode abgebaut werden muss, ist der Anstieg des Steuerstroms zur Basis des betroffenen Transistors langsamer und die Steuerspannung um 0,7 V der Durchlassspannung der Diode geringer. Beim Einschalten bleibt dieser Transistorzweig gesperrt. Simulationen sind gute Hilfsmittel, deren Ergebnissen darf nicht blindlings vertraut werden.
Methoden der Ansteuerung
Statische Ansteuerung
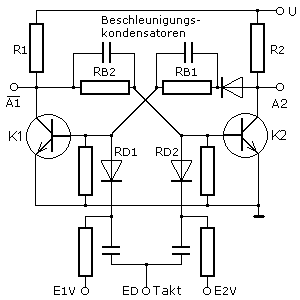
In der Schaltung mit unsymmetrisch dimensioniertem Spannungsteiler leitet beim Anlegen der Betriebsspannung der Transistor K2 rechts schneller und hält den Transistor K1 gesperrt. Dieser stabile Schaltzustand ist über die Steuereingänge umschaltbar. Eine ausreichend positive Spannung am Eingang E1 schaltet den gesperrten Transistor K1 leitend und senkt das Basispotenzial des K2, der in den Sperrzustand wechselt. Dieser zweite stabile Zustand bleibt gespeichert, auch wenn E1 danach zwischen null und positiver Spannung wechselt. Mit E1 = 0 V oder offenem Eingang und einer positiven Steuerspannung an E2 wird der Transistor K2 leitend gesteuert, der dann K1 sperrt. Auch dieser Zustand bleibt gespeichert, solange nur die Steuerspannung an E2 zwischen null und einem positiven Wert wechselt. Das Steuersignal muss nur solange anliegen, bis die Umschaltung sicher erfolgt ist. Werden die Eingänge wechselseitig umgeschaltet, führen die beiden Ausgänge A1 und A2 mit High und Low immer entgegengesetzte Potenziale.
Diese gewünschte Schaltcharakteristik ist gestört, wenn beide Eingänge gleichzeitig eine positive Steuerspannung erhalten. Beide Transistoren werden leitend und schalten die Ausgänge auf Low-Potenzial, ein erlaubter und reproduzierbarer Zustand. Wechseln danach die Eingänge gleichzeitig auf 0 V, dann schalten die Transistoren durch den unsymmetrisch dimensionierten Basisspannungsteiler, vielleicht zusätzlich unterstützt durch eine Diode, in den definierten Anfangszustand mit leitendem K2 und gesperrtem K1. Ohne diese Vorkehrungen würden Bauteiltoleranzen und äußere Einflüsse einen zufälligen neuen stabilen Schaltzustand ergeben.
Dynamische Ansteuerung
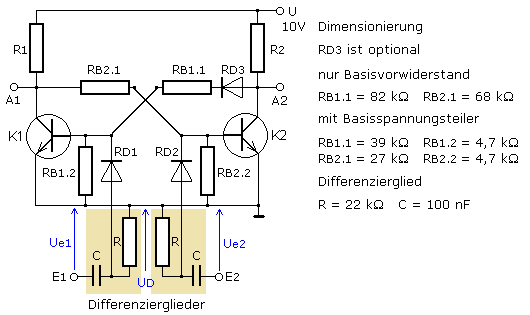
Bei der statischen Ansteuerung fließt für den angesteuerten Transistor der Basisstrom unnötig lange und wird in Verlustwärme umgesetzt. Der Schaltvorgang kann dynamisch durch einen kurzen Impuls mit steiler Flanke ausgelöst werden. Mit zusätzlichen Dioden im Steuerkreiskreis wird der Schaltvorgang auf steigende oder fallende Steuerflanken festgelegt. Die Steuerimpulse erzeugt ein RC-Hochpass, der als Differenzierglied dimensioniert ist. Die Diode RD1 oder RD2 lässt je nach Polung nur positive oder negative Flanken für die Steuerung zur Basis des Transistors passieren.
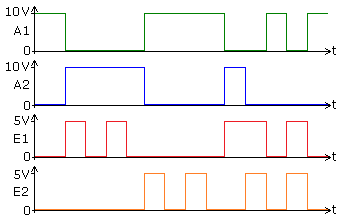
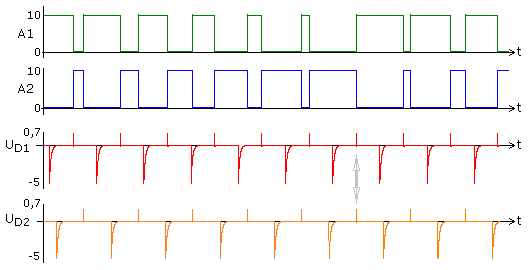
Die folgenden Schaltdiagramme zeigen das Simulationsergebnis für die dynamische Ansteuerung der bistabilen Kippstufe mit Rechtecksignalen 15 Hz an E1 und 13 Hz an E2. Die Diagramme zeigen, dass nur die positiven Signale der Differenzglieder die Transistoren ansteuern. Die Ausgangssignale A1 und A2 sind zueinander entgegengesetzt. Zum markierten Zeitpunkt erfolgen die Schaltimpulse gleichzeitig und die Kippstufe wechselt in ihren definierten Einschaltzustand mit leitendem Transistor K2.
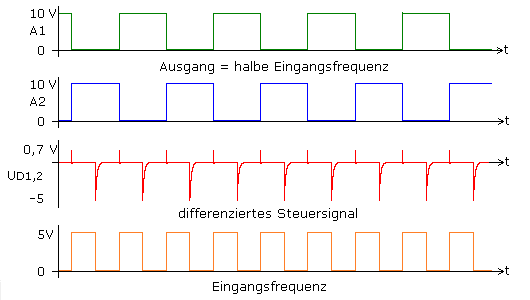
Werden die beide Dioden zusammengeschaltet und nur von einer differenzierten Eingangsfrequenz versorgt, dann arbeitet die Kippstufe als Frequenzteiler. An den Ausgängen A1 und A2 stehen zueinander invertierte Rechtecksignale mit der halben Frequenz des Steuersignals. Der positive Steuerimpuls am schon leitenden Transistor ist wirkungslos, während der zum gleichen Zeitpunkt gesperrte Transistor leitend geschaltet wird und den Partner dadurch sperrt. Das folgende Bild zeigt die Schaltdiagramme.
Verkürzen der Transistorschaltzeiten
Einen Transistor schnell in den leitenden Zustand zu schalten, gelingt durch Übersteuerung mit ausreichend hohem Basispotenzial von 0,8 ... 1 Volt. Das bedingt je nach Transistortyp einen großen Basisstrom zwischen 0,5 ... 2 mA. Die Ausschaltzeit eines übersteuerten Transistors ist bedeutend länger, denn bevor er sperren kann, müssen alle Elektronen der leitenden Basis-Emitter-Zone abgeflossen sein. Ein parallel zum Basisvorwiderstand geschalteter Kondensator beschleunigt beide Schaltzeiten und sorgt damit beim Ausgangssignal der Kippstufe für steilere Signalflanken. Mit Schaltzeiten und deren Optimierungen gibt es im Kapitel zum Transistor als Schalter weiterführende Darstellungen.
Dynamisch gesteuerte Kippstufe mit Vorbereitungseingängen
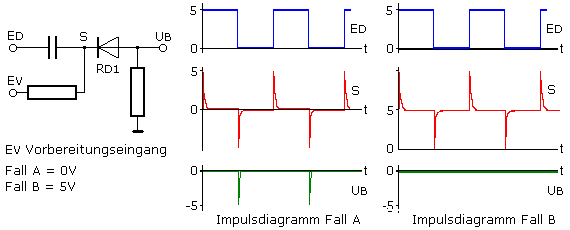
Durch statische Vorbereitungseingänge EV kann das Schaltverhalten zusätzlich beeinflusst werden. Wird eine Kippstufe mit negativen Impulsflanken geschaltet, so verhindert eine positive Spannung am Vorbereitungseingang diesen Prozess. Der Impulstakt kann nur bei 0 Volt am Vorbereitungseingang wirksam werden. Eine negative Spannung an diesem statischen Eingang hält den Transistor immer gesperrt. Das Bild zeigt beide Eingänge und die Impulsdiagramme für einen Transistor, wobei UB sein Basissignal ist.
Mit positiver Impulsflanke dynamisch gesteuerte Kippschaltungen lassen sich ebenso mit Vorbereitungs- oder Bedingungseingängen versehen. Der Takt kann nur bei 0 Volt am Zusatzeingang wirksam werden. Eine negative Spannung verhindert die Taktsteuerung an diesem Transistor. Eine dauerhafte positive Spannung hält diesen Transistor immer durchgeschaltet.
In den meisten Fällen werden die beiden dynamischen Eingänge zum gemeinsamen Takteingang geschaltet. Die Zustände an den Bedingungseingängen lösen mit Eintreffen der richtigen Taktflanke den Schaltvorgang aus und wirken sich auf das Ausgangssignal der Schaltung aus. Das folgende Schaltungsprinzip zeigt eine Kippstufe mit definiertem Einschaltzustand. Der Ausgang A2 hat Low-Signal, und A1 ein High-Signal. Die Zustände der Bedingungseingänge werden mit fallender Signalflanke des dynamischen Takteingangs verarbeitet.
Einsatzbereiche
Bistabile Kippschaltungen (Flipflops) werden in elektronischen Schaltungen oft eingesetzt. Zwei wichtige Anwendungsbereiche sind phasenstarre Frequenzteiler und Signalspeicher. In der Digitaltechnik sind sie weit verbreitet, wo es sie als vollintegrierte Schaltkreise unterschiedlicher Typen gibt. Das Timer-IC 555 ist ein universeller integrierter Baustein, der sich auch gut für TTL-kompatible Flipflopschaltungen eignet.