Master-Slave RS-Flipflop
Verglichen mit der Zustandssteuerung erreicht man bei Schaltwerken mit Taktsteuerung eine bessere Störsicherheit. Die Verarbeitung der Information erfolgt wie bei den taktzustandsgesteuerten RS- und D-Flipflops erst nach der Änderung des Taktpegels. Eine besonders sichere Arbeitsweise ergibt sich beim Zusammenwirken von zwei taktgesteuerten Speicherwerken, wo das eine nach der Vorderflanke und der zweite Speicher nach der Rückflanke des Taktsignals arbeitet. Mit der dynamischen Taktflankensteuerung wird eine nochmalige Verbesserung erreicht.
Master-Slave-Prinzip
Die Eingangsdaten liegen bei S und R am ersten Speicher an und sollen nach dem positiven Taktwechsel eingelesen werden. Der Ausgang Q1 und Q2 des Schaltwerks bleibt in dieser Zeit unverändert. Der Eingangsspeicher wird als Master bezeichnet. Bei der im Bild gezeigten Taktpegelsteuerung übernimmt der Master zum Zeitpunkt t2 die Eingangsdaten. Er verarbeitet sie und gibt das Ergebnis an seine Ausgänge, die im Schaltwerk nicht nach außen geführt sind. Pegeländerungen oder einwirkende Störungen haben solange Einfluss, bis zum Zeitpunkt t3 die Eingangstore des Masters geschlossen werden. Eine Taktflankensteuerung kann mit dem viel kürzeren Taktpuls die Eingangstore eher schließen. Die Ausgangspegel des Masters sind jetzt gespeichert und bilden die Eingangssignale des folgenden Speicherwerks.
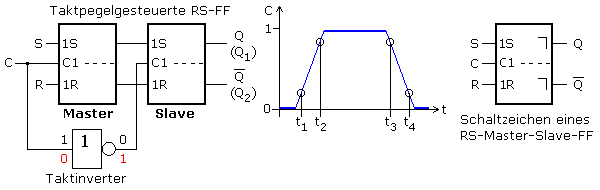
Der zweite Speicher, als Slave bezeichnet, wird vom invertierten Eingangstakt gesteuert. Seine Eingangstore öffnen nach der fallenden Taktflanke und übernehmen zum Zeitpunkt t4 die vom Master anliegenden Informationen. Erst jetzt gelangt das Ergebnis der Eingangsdaten an die Ausgänge Q1 und Q2. Bei dynamischer Taktsteuerung sind nach Ablauf des Taktpulses die Eingangstore vom Slave gesperrt, sodass Störungen oder andere Datenpegel außerhalb der Taktflanken wirkungslos bleiben. Bei der Taktpegelsteuerung bleiben die Eingänge vom Slave so lange störanfällig, bis die folgende positive Taktflanke zum Zweitpunkt t1 den Slave sperrt und vom Master trennt.
Die im Schaltzeichen eingezeichneten rechtwinkligen Haken kennzeichnen die Ausgänge als retardierend. Die Auswertungen der Eingangspegel liegen dabei verzögert erst nach Ablauf eines Taktzyklus am Ausgang an. Beim RS-Master-Slave-FF sollte der noch bestehende irreguläre Zustand vermieden werden. RS-Master-Slave Flipflops müssten aus Einzelgattern aufgebaut werden. Als integrierte Speicherwerke gibt es die universell einsetzbaren zweiflankengesteuerten JK-Master-Slave-Flipflops. Verglichen mit der dargestellten Taktpegelsteuerung bietet die übliche Taktflankensteuerung eine bessere Störsicherheit.
Master-Slave D-Flipflop
Das D-Flipflop reagiert auf die irreguläre Eingangskombination des RF-FF mit dem Speicherzustand. Mit zwei D-FF kann ein verbessertes Master-Slave Flipflop aufgebaut werden. Mit nur einen Daten und Takteingang erfüllt es Setzen, Rücksetzen und Speichern. Am Slave sind beide Ausgänge nutzbar. Der im Bild gegenüber dem Taktsignal schneller wechselnde Datenpegel ist beabsichtigt und verdeutlicht die Arbeitsweise des Master-Slave-Flipflops. Nur zu den Zeitpunkten bei B wird der aktuelle Datenpegel des Masters Qm auf den Slave und damit an den Ausgang Q gegeben.
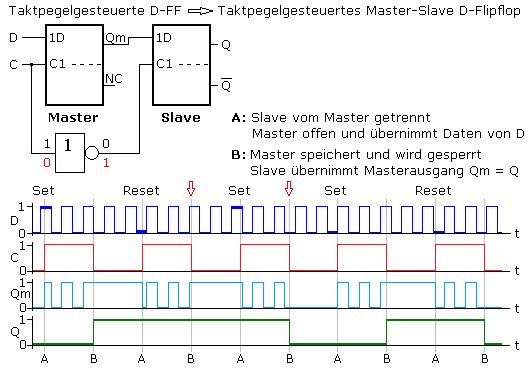
Interpretiert man die meisten Pegelwechsel an D als Störsignale, so kann man die hohe Störsicherheit des Master-Slave-Verfahrens erkennen. Um nur die im Bild hervorgehobenen Datenpegel zu den Zeitpunkten A an jeder positiven Taktflanke auszuwerten, reicht die Taktpegelsteuerung aber nicht aus. Das Eingangstor des Master-FF ist zu lange offen und der erwartete Ausgangspegel an Q stimmt zum Zeitpunkt B nicht immer mit dem des vorhergehenden bei A überein. Eine dynamische Zweiflankensteuerung schließt die Eingangstore der Master- und Slave-Speicher nach rund 5 ns. Nachfolgende Pegeländerungen bleiben dann wirkungslos.
Zweiflankengesteuertes JK-Flipflop
Das zweiflankengesteuerte JK-Flipflop ist ein vielseitig verwendbares, sehr störsicheres Master-Slave Flipflop. In diesem Schaltwerk muss nur der Master ein JK-FF sein. Die Ausgangspegel des Masters sind zueinander immer entgegengesetzt. Der Slave kann somit ein RS-FF sein, da der irreguläre Eingangszustand ausgeschlossen ist.
Zur eingehenden Untersuchung der Arbeitsweise des zweiflankengesteuerten JK-Master-Slave Flipflop wurde es, wie im folgenden Bild zu sehen, für eine Simulation aus Einzelbaugruppen zusammengestellt. Somit lassen sich auch die Signale darstellen, die am kommerziellen IC nicht messbar sind.
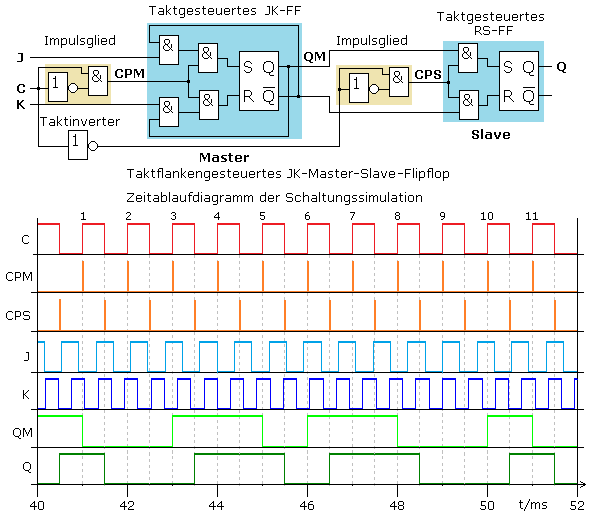
Der Steuertakt C wird durch Impulsglieder in gleich kurze Taktpulse CPM für den Master und CPS für den Slave aufbereitet. Damit der Slave auf der fallenden Taktflanke schaltet, wird sein Taktsignal zuvor invertiert. Um die gute Störsicherheit zu demonstrieren, wurden die Frequenzen der Datensignale an J und K bewusst unterschiedlich und höher als der Takt eingestellt.
Die Signalzuordnungen im Zeitablaufdiagramm sind für die positiven Taktflanken 1 bis 3 eindeutig. Bei 4 wird der Ausgang QM gesetzt, obgleich für J und K die Pegel nach Low wechseln. Da aber der Steuerpuls eine endliche Breite hat, bestimmt zum Pulsende der gerade noch bestehende High Pegel von J. An den positiven Taktflanken 5 bis 7 sind die Pegelzustände an J und K wieder eindeutig erkennbar. Bei 9 liegt zum Pulsanfang an J High Pegel und zum Pulsende an K ebenfalls High Pegel. Das JK-FF toggelt und wechselt zum Reset. An den Taktflanken 10 und 11 sind die Eingangspegel an J und K eindeutig unterscheidbar.
Das Schaltzeichen eines JK-Master-Slave Flipflops entspricht dem des dynamischen JK-FF. Der Slave und die Invertierung seines Takts werden nicht dargestellt, dafür sind die Ausgänge mit den Winkelzeichen als retardierend gekennzeichnet. Die JK-Master-Slave Flipflops gibt es für High oder Low aktive dynamische Taktsteuerung. Sie können weitere vom Takt unabhängige, übergeordnete statische Steuereingänge für Preset, Clear oder Enable, der Taktfreigabe haben. Das Bild zeigt neben dem JK-Master-Slave noch die davon abgeleiteten D- und T-Master-Slave Flipflops.
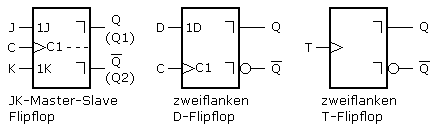
Das D-Master-Slave Flipflop kann mithilfe eines Inverters aus einem JK-Master-Slave-FF gebildet werden. Dazu wird der J-Eingang über den Inverter mit dem K-Eingang verbunden. Der J-Eingang wird als einziger Dateneingang zum D-Eingang. Das T-Master-Slave Flipflop arbeitet als Toggle-FF, wenn beim JK-Master-Slave-FF an beiden Eingängen dauerhaft High Pegel anliegt.